3.6.1 Periodic motion
3.6.1.1 Circular motion
Why does centripetal force exist
- An object in a circular motion is constantly changing direction
- Its velocity is changing hence it is accelerating
- Acceleration requires a resultant force = centripetal force
Angular speed / velocity
- \(\omega = \frac{d\theta}{dt} = \frac{2\pi}{T} = 2\pi f = \frac{v}{r}\)
- Unit = rad \(s^{-1}\)
- All points in a rotating object have the same angular velocity
Tangential / linear speed
- \(v = r\omega\)
- Unit = m \(s^{-1}\)
Centripetal acceleration
- \(a = \frac{v^{2}}{r} = \omega^{2}r\)
Centripetal force
- The force that acts towards the centre of the circular path i.e. acts perpendicular to the direction of motion
- \(F = ma = \frac{mv^{2}}{r} = m\omega^{2}r\)
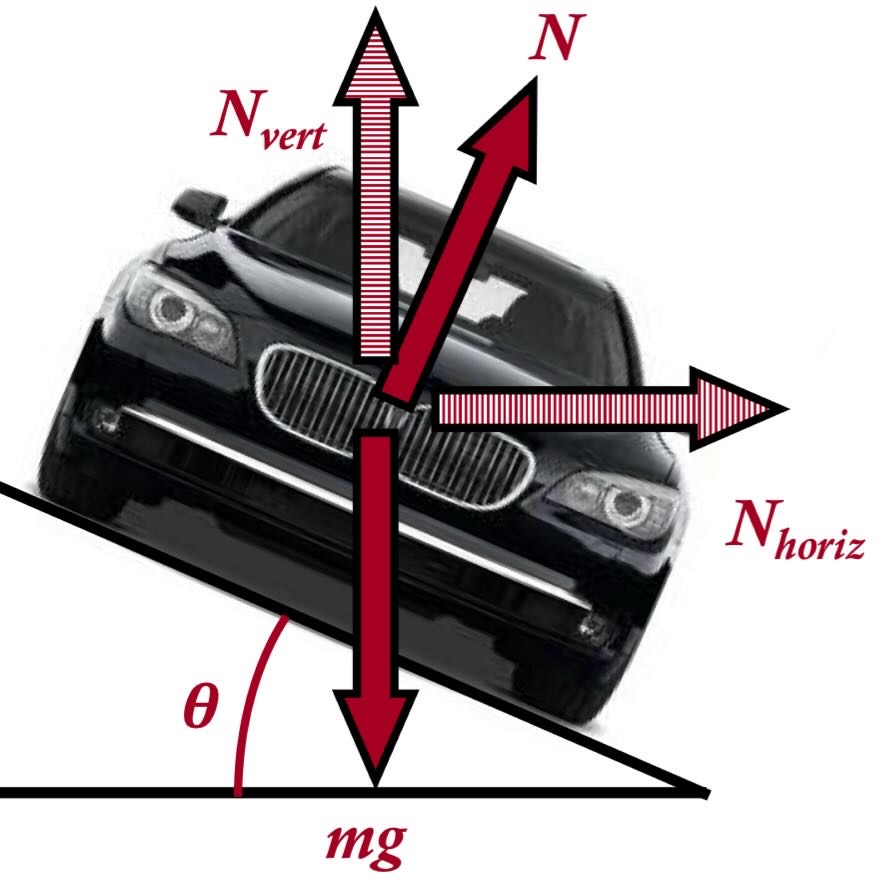
Banked tracks
- Provide extra centripetal force via normal reaction force (horizontal component is towards the centre)
- In horizontal track friction is the only source of centripetal force
Roller coaster
- Head pointing downwards: some centripetal force provided by the weight = less normal force
- Head pointing upwards: more support force needed to counter the weight and provide centripetal force
3.6.1.2 Simple harmonic motion (SHM)
Simple harmonic motion
- The acceleration of the object is proportional to the displacement in the opposite direction
- Acceleration is directed towards the mean position
- Defining equation for SHM: \(a = -\omega^{2} x\)
Period
- Time for one complete oscillation
Amplitude
- Maximum displacement from equilibrium position
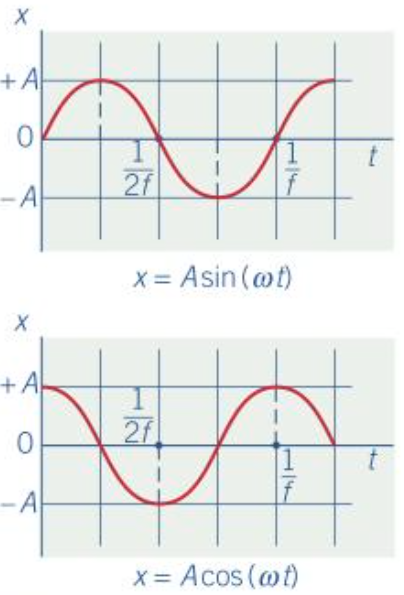
Mathematical solutions
- Starting at 0 displacement
- \(x = A \sin \omega t\)
- \(v = A\omega \cos \omega t\)
- \(a = -A\omega^{2} \sin \omega t\)
- Starting at maximum displacement
- \(x = A \cos \omega t\)
- \(v = -A\omega \sin \omega t\)
- \(a = -A\omega^{2} \cos \omega t\)
- Velocity
- \(v = \pm \omega \sqrt{A^{2} - x^{2}}\)
- Maximum speed and acceleration
- \(\text{Maximum speed} = \omega A\)
- \(\text{Maximum acceleration} = \omega^{2} A\)
Motion graphs for SHM
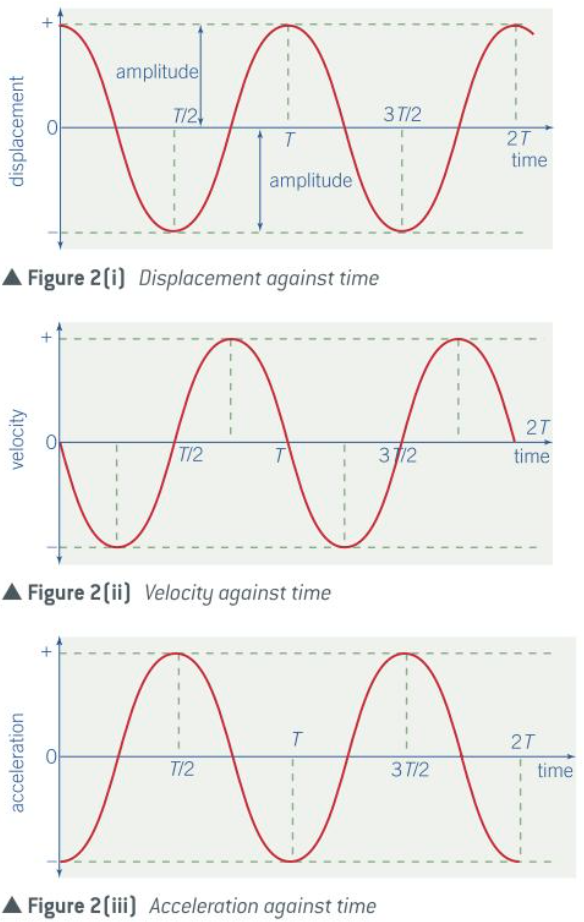
- Gradient of d-t graph = v-t graph
- Gradient of v-t graph = a-t graph
- Shifts to the left by \(\frac{\pi}{2}\) each time
3.6.1.3 Simple harmonic systems
Free oscillation
- No energy lost during oscillations
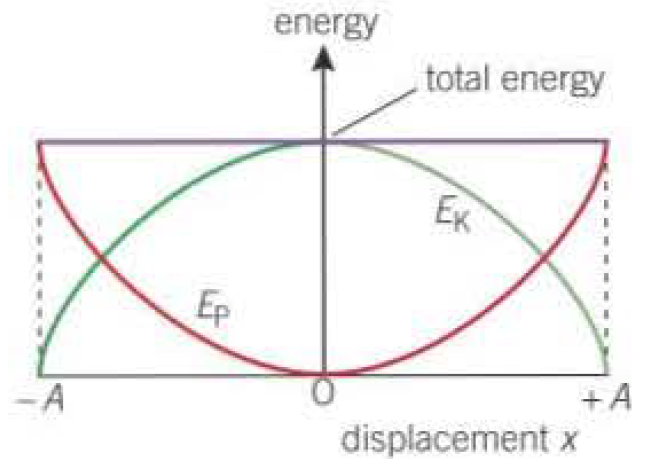
Energy changes
- \(\text{Energy} \propto A^{2}\)
- \(E = KE + PE\)
- Kinetic energy
- Minimum when \(x = \pm A\)
- Maximum when \(x = 0\)
- Potential energy
- Minimum when \(x = 0\)
- Maximum when \(x = \pm A\)
- Total energy remains constant unless being forced / damped
Mass-spring system
- \(\omega = \sqrt{\frac{k}{m}}\)
- \(T = \frac{2\pi}{\omega} = 2\pi \sqrt{\frac{m}{k}}\)
- \(E_{k} = \frac{1}{2} kA^{2} - \frac{1}{2} kx^{2}\)
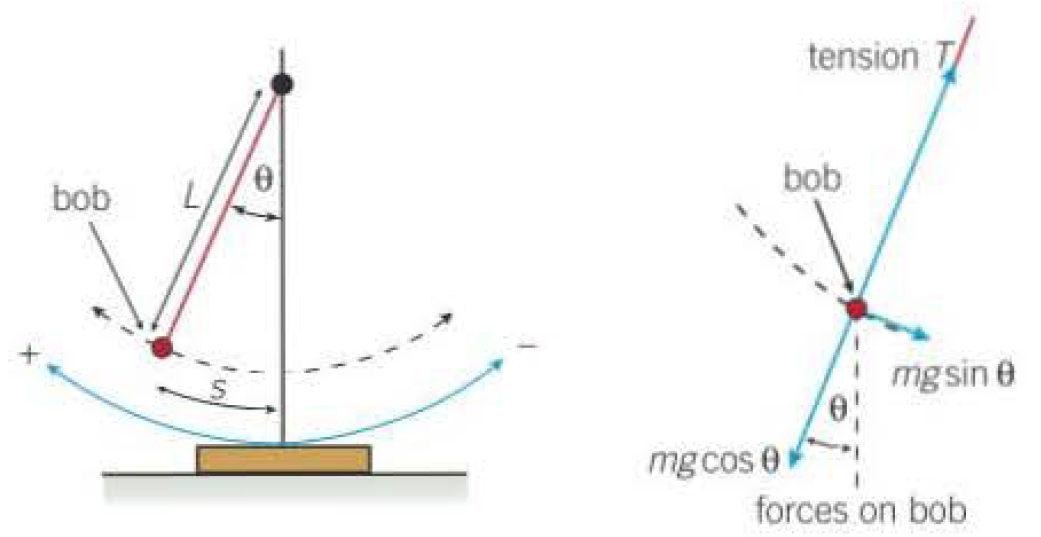
Simple pendulum
- \(\omega = \sqrt{\frac{g}{l}}\)
- \(T = \frac{2\pi}{\omega} = 2\pi \sqrt{\frac{l}{g}}\)
- Only works when \(\theta\) does not exceed approx. 10° / amplitude is small
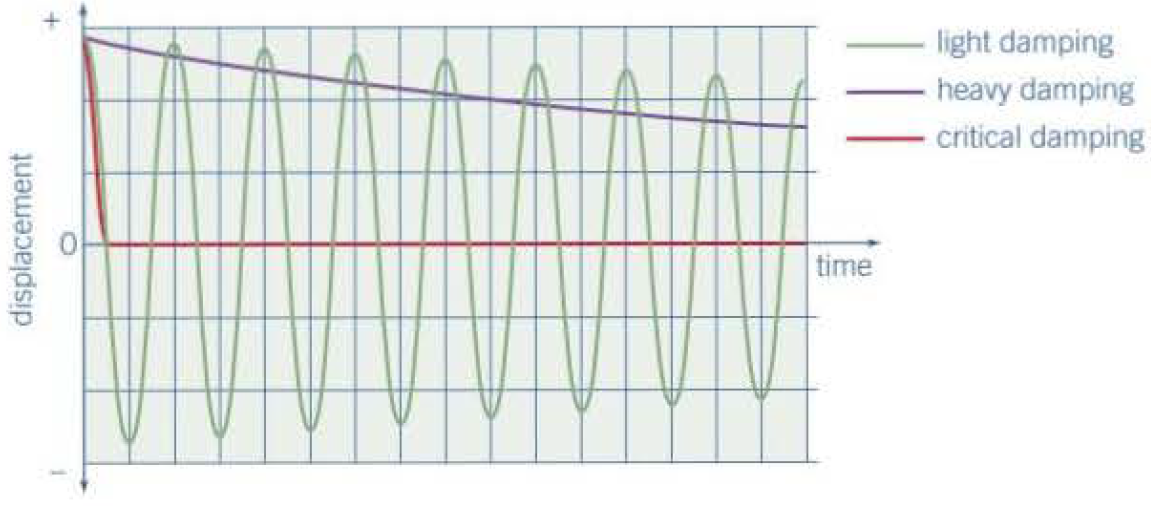
Damped oscillations
- Oscillations that reduce in amplitude due to the presence of resistive forces
- Lightly damped system
- Amplitude decrease exponentially over time
- Constant frequency
- \(A = A_{0} e^{-Ct}\) (\(C\) is an arbitrary constant, depends on level of damping)
- Critically damped system
- System returns to equilibrium in the shortest possible time without oscillation
- Heavily damped system
- System returns to equilibrium more slowly than critical damping without oscillating
3.6.1.4 Forced vibrations and resonance
Free vibrations
- No damping \(\rightarrow\) the amplitude of the oscillations is constant
- No periodic force acting on the system other than internal forces
- No energy input
Forced vibrations
- System made to oscillate by a periodic external force / energy source / another oscillator it is connected to
- Oscillator is acted on by a periodic external force
- Energy is given periodically by an external source
- Made to oscillate at the frequency of another oscillator
Natural frequency (\(f_{0}\))
- The frequency that an object oscillates at if it is displaced from its equilibrium position
Resonance
- Applied frequency of the periodic force = the natural frequency of the system (state what is applied frequency / what produces it)
- Phase difference between system and the periodic force = \(\frac{1}{2}\pi\)
- Energy is transferred to the system more efficiently so the system gains max KE
- The driving force continually supplies energy to the system
- The amplitude of the oscillator increases
- The amplitude would increase indefinitely if no resistive forces are present
Resonant frequency
- The frequency with the maximum oscillating amplitude (the oscillating system in resonance)
Effect of damping on resonance frequency
- Damping reduces the resonance frequency
- When a system is damped, a resistive force is acting against the restoring force so the object travels slower \(\rightarrow\) lower resonance frequency
Amplitude-driving frequency graphs
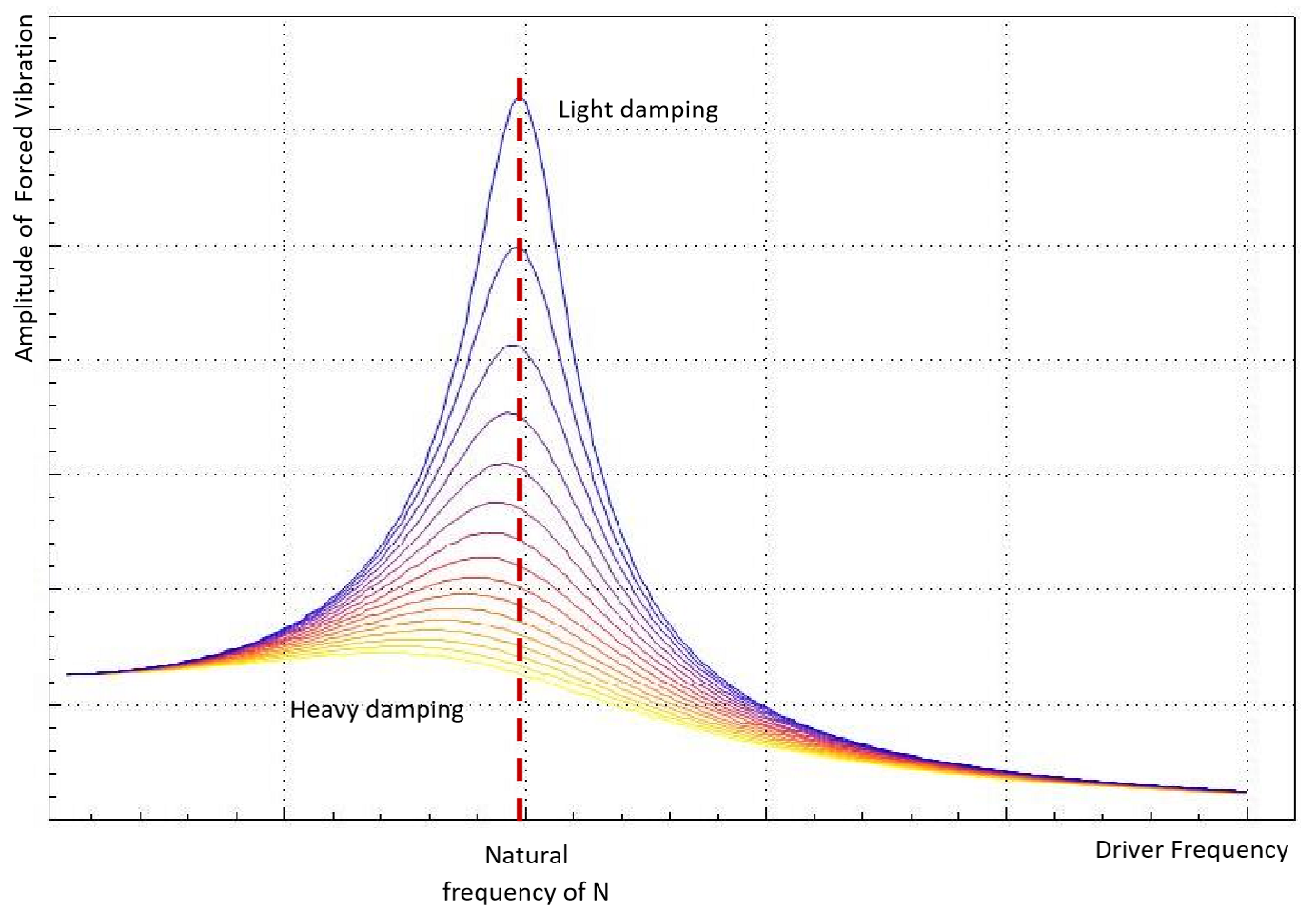
- More damping = smaller maximum amplitude at resonance
- Less damping = sharpness of the peak amplitude of the curve increases, larger maximum amplitude
- The closer the driving frequency is to the natural frequency the larger the amplitude
Barton's pendulums
- The driver pendulum is displaced and released so that it oscillates in a plane perpendicular to the plane of the pendulums at rest
- All pendulums swing at a very small amplitude except the one which has the same / similar length to the driver pendulum
- \(T = 2\pi \sqrt{\frac{l}{g}}\)
- Only that pendulum's frequency matches the natural frequency of the driver pendulum
- \(\frac{\pi}{2}\) out of phase with the driver pendulum
- Oscillates in resonance with the driver pendulum
