3.4.1 Force, energy and momentum
3.4.1.1 Scalars and vectors
Vector
- Any physical quantity that has a direction as well as a magnitude
- e.g. velocity, force / weight, acceleration, displacement
Scalar
- Any physical quantity that is not directional
- e.g. speed, mass, distance, temperature
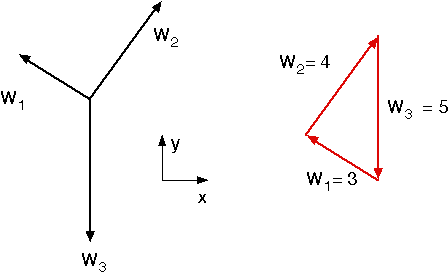
Conditions for equilibrium
- For an object to be in equilibrium, the sum of all the forces acting on an it must be 0
- e.g. 3 forces form a closed triangle
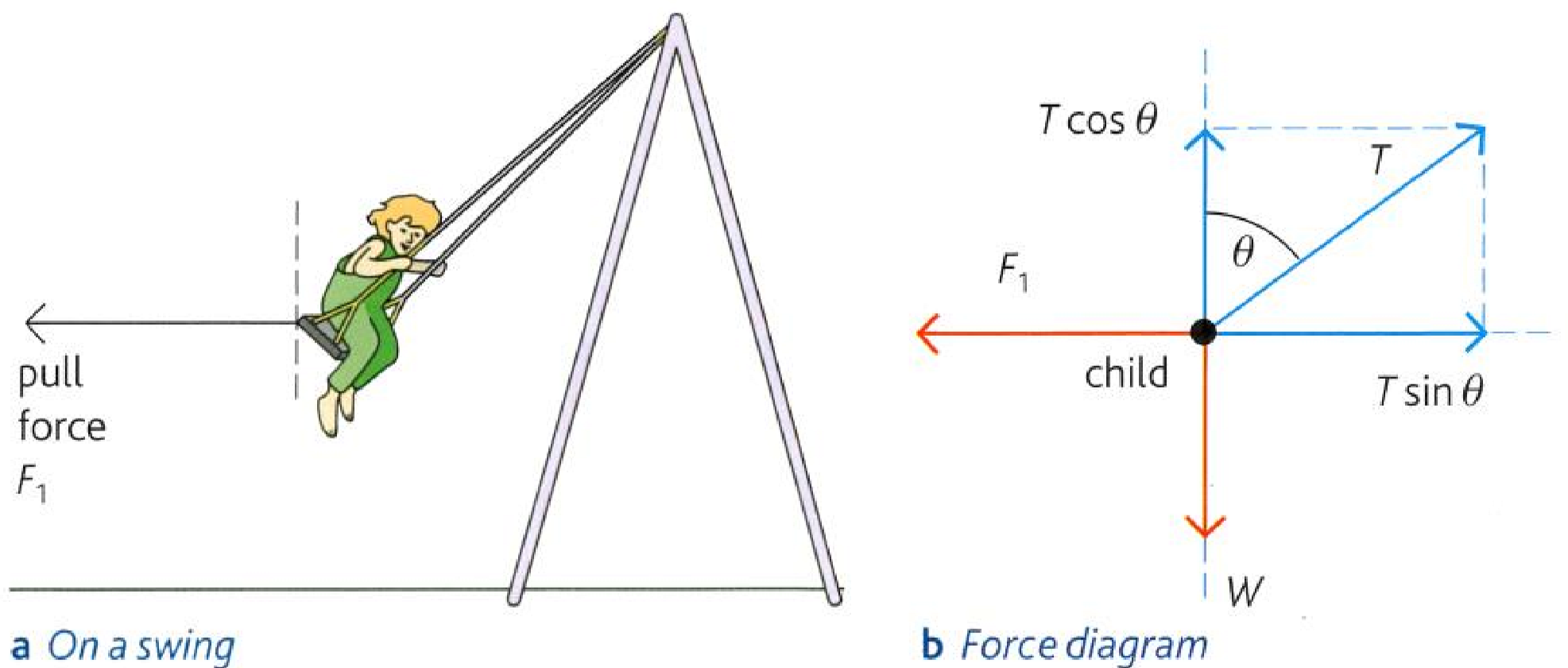
Explaining what forces balance each other
- e.g. child on swing
- Pull force balances with the horizontal component of tension
- Weight balances with the vertical component of tension
3.4.1.2 Moments
Moment formula
- \(\text{Moment of a force about a point} = \text{force} \times \text{perpendicular distance from the pivot point to the line of action of the force}\)
Couple
- A pair of equal and opposite parallel / coplanar forces acting on a body along different points
- Exerts a turning force on a body
- \(\text{Moment of couple} = \text{force} \times \text{perpendicular distance between the lines of action of the forces}\)
Principle of moments
- For an object in equilibrium, there is no resultant turning forces about any pivot
Centre of mass
- The point at which an object's mass / weight acts
- The point through which a single force on the body has no turning effect
Finding centre of mass
- Uniform regular solid
- Centre of mass at the centre
- Non-regular card
- Hang object (and plumb line) by first pivot
- Draw first line vertically below pivot (by sketching a plumb line hang from the pivot)
- Hang object (and the plumb line) by second pivot
- Draw second line vertically below pivot
- Intersection of lines is the centre of mass
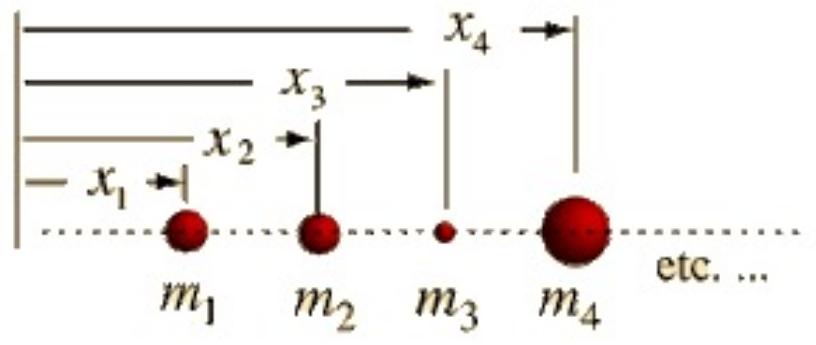
- Multiple mass on a rod
- \(x_{cm} = \frac{\sum m_{i} x_{i}}{\sum m_{i}}\)
Equilibrium stability
- Stable
- Object returns to its equilibrium position if displaced (a little)
- Wide base, low centre of gravity
- Tilted for a certain angle before centre of mass crosses the pivot point and topple
- Unstable
- Object does not return to its equilibrium position if displaced
- Topple immediately after being tilted
- Neutral
- Stay in place when left alone
- Stay in the new position when moved
- The object's centre of mass is always exactly over the point which is its 'base'
Tilting / topping
- Tilting
- An object resting on a surface is acted on by a force that raises it up on 1 side
- For an object to tilt: \(Fd > \frac{Wb}{2}\) (\(b\) = width of base)
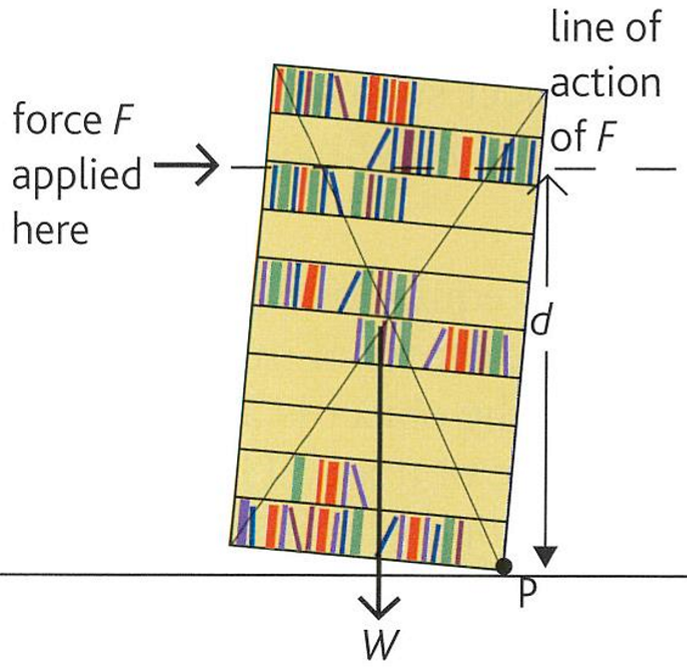
- Toppling
- Tilted too far
- Line of action of its weight passes beyond the pivot
Two support problems
- When an object is in equilibrium and supported by 2 points then the 2 supports add up to the weight of the object
- The support closer to the centre of mass provides more of the support force
On a slope
- The line of action of weight must lie inside the base of the object to prevent tilting
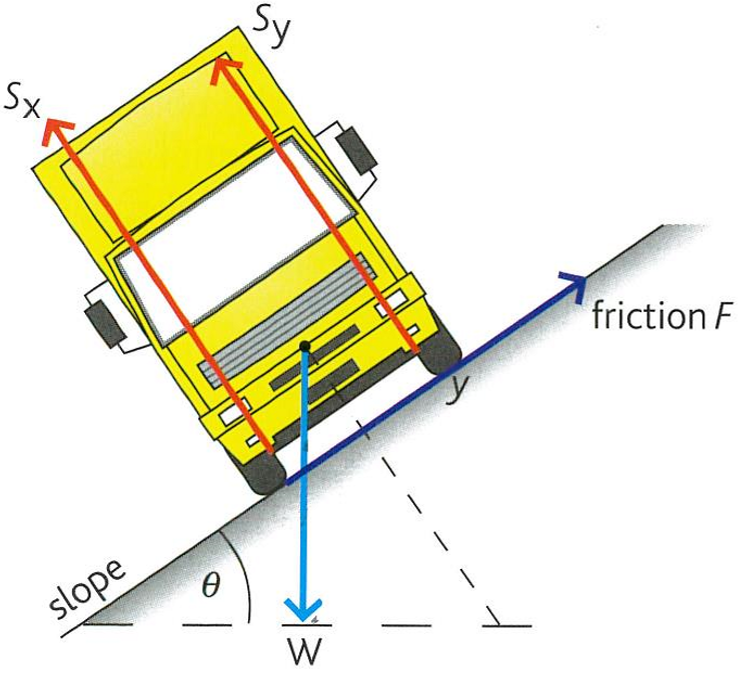
- \(S_{x} > S_{y}\) since \(x\) is lower than \(y\) (more moment is needed to be produced from \(x\) as it is closer to the centre of mass)
Conditions for equilibrium
- No resultant force
- No resultant moment / torque (the principle of moments must apply)
3.4.1.3 Motion along a straight line
Terms
| Term | Definition |
|---|---|
| Speed | A scalar quantity describing how quickly an object is travelling |
| Displacement | The overall distance travelled from the starting position (includes a direction, vector quantity) |
| Velocity | Rate of change of displacement (\(= \frac{\Delta s}{\Delta t}\)) |
| Instantaneous velocity | The velocity of an object at a specific point in time |
| Average velocity | The velocity of an object over a specified time frame |
| Acceleration | Rate of change of velocity (\(= \frac{\Delta v}{\Delta t}\)) |
| Uniform acceleration | The acceleration of an object is constant |
SUVAT equations
- For uniform acceleration
- \(v = u + at\)
- \(s = (\frac{u + v}{2}) t\)
- \(s = ut + \frac{1}{2} at^{2}\)
- \(s = vt - \frac{1}{2} (at)^{2}\)
- \(v^{2} = u^{2} + 2as\)
Motion graphs
| Displacement-time | Velocity-time | Acceleration-time | |
|---|---|---|---|
| Gradient | Velocity | Acceleration | / |
| Area | / | (Change in) displacement | Change in velocity |
Free fall
- \(u = 0\)
- \(a = g\)
Light gate
- \(\text{speed through the light gate} = \frac{\text{length of the object}}{\text{time for the light to be obscured}}\)
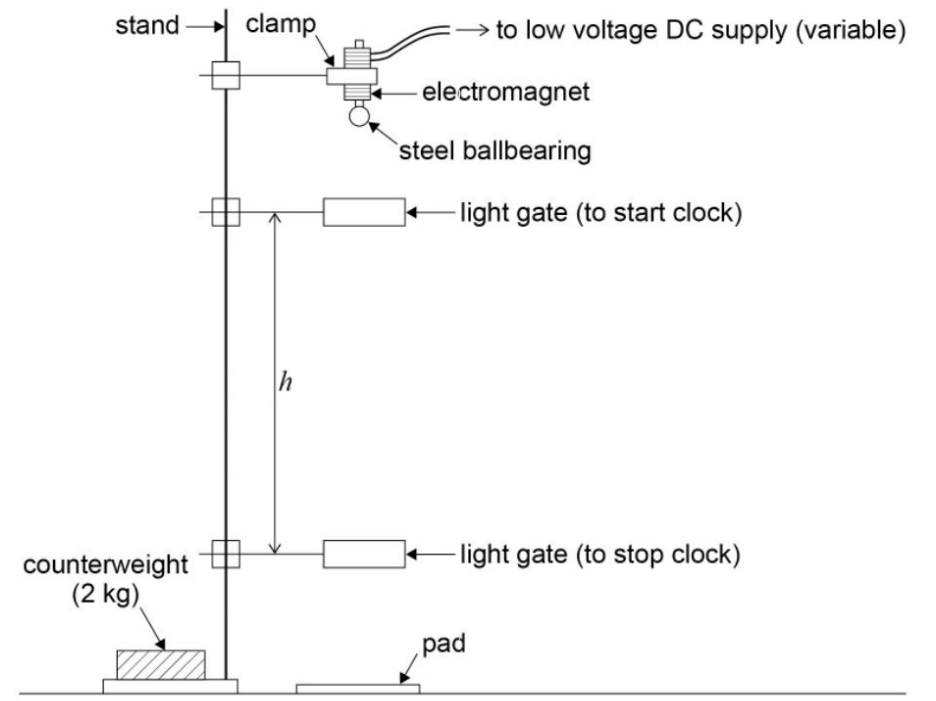
Required practical 3 - determining \(g\)
Equipment
- Stand
- Bosses and clamps
- Electromagnet
- Steel ball bearing
- Light gate
- Timer (connected to the light gate)
- Soft cushion pad
How to determine \(g\) by free fall
- Set up the apparatus as shown
- The position of the lower light gate should be adjusted such that the height \(h\) is 0.500m, measured using the metre rule
- Turn on the electromagnet and attach the ball bearing
- Reset the timer to zero and switch off the electromagnet
- Read and record the time \(t\) on the timer for the ball to pass through the 2 light dates
- Reduce \(h\) by 0.050m by moving the lower light gate upwards and repeat this, reducing h by 0.050m each time until \(h\) reaches 0.250m (at least 5-10 values of \(h\))
- Repeat the experiment twice more for each value of \(h\) and find and record the mean \(t\) for each \(h\)
- Plot a graph of \(\frac{2h}{t}\) against \(t\) and draw a line of best fit (\(\frac{2h}{t} = 2u + gt\))
- Gradient = \(g\), y-intercept = \(2u\)
- (You might want to draw lines of maximum and minimum gradient and find the mean gradient)
Errors
- Systematic
- Residue magnetism after the electromagnet is switched off may cause t to be recorded as longer than it should be
- Air resistance reduces the value of \(g\) determined
- Random
- Large uncertainty in \(h\) from using a metre rule with a precision of 1 mm
- Parallax error from reading \(h\)
- The ball may not fall accurately down the centre of each light gate (less time obscuring the light)
- Random errors are reduced through repeating the experiment for each value of h at least 3-5 times and finding an average time, \(t\)
Safety
- The electromagnetic requires current
- No water near it
- Only switch on the current to the electromagnet once everything is set up to avoid electrocution
- A cushion or a soft surface must be used to catch the ball-bearing so it doesn’t roll off / damage the surface
- The tall clamp stand needs to be attached to a surface with a G clamp so it stays rigid
3.4.1.4 Projectile motion
Motion equations ignoring air resistance
- \(v_{x} = u \cos \theta\)
- \(x = ut \cos \theta\)
- \(v_{y} = u \sin \theta - gt\)
- \(y = ut \sin \theta - \frac{1}{2} gt^{2}\)
Range and maximum height formula (not required but useful)
- \(\text{Maximum height} = \frac{u^{2} (\sin \theta)^{2}}{2g}\)
- \(\text{Horizontal range} = \frac{u^{2} \sin 2\theta}{g}\)
- \(\text{Time to maximum height} = \frac{u \sin \theta}{g}\)
- \(\text{Time back to starting height} = \frac{2u \sin \theta}{g}\)
Friction
- A force which opposes the motion of an object
- AKA drag / air resistance
- Convert KE into other forms of energy such as heat and sound (work done on the surface / fluid)
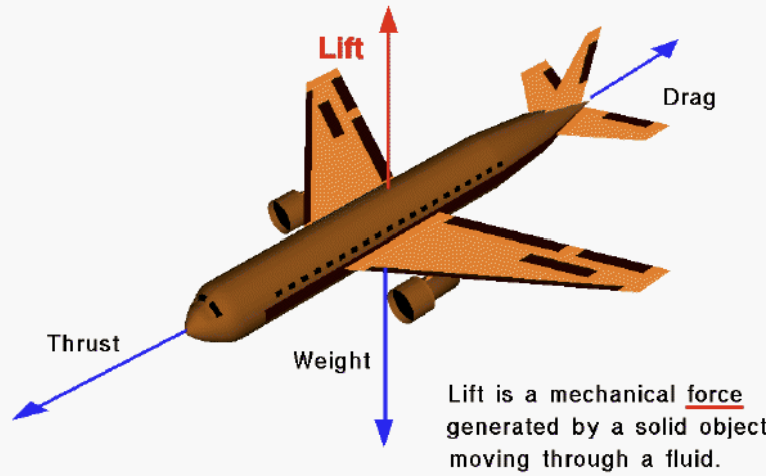
Lift
- An upward force which acts on objects travelling in a fluid
- Caused by the object creating a change in the direction of the fluid flow
- Happens if the shape of the projectile causes the air to flow faster over the top of the object than underneath it
- Pressure of air on the top surface < pressure of the air on the bottom surface
- Produces a net upward force
- Acts perpendicular to the direction of fluid flow
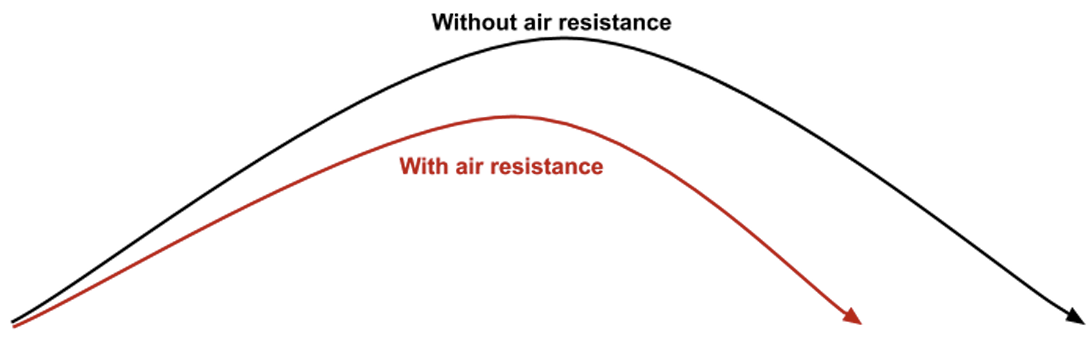
Effect of air resistance (friction)
- Air resistance / drag force acts in the opposite direction of motion of the projectile
- Increases as the projectile's speed increases
- Has both horizontal and vertical components
- Reduces both the horizontal speed of the projectile and its range
- Reduces the maximum height of the projectile if its initial direction is above the horizontal and makes its descent steeper than its ascent
Terminal velocity
- Occurs where the frictional forces acting on an object and the driving forces are equal
- No resultant force \(\rightarrow\) no acceleration \(\rightarrow\) travels at constant speed / velocity
Terminal velocity for objects falling
- Start initially with free fall (uniform acceleration) briefly
- The only force acting on the object is weight
- (Other forces are very small and negligible)
- Speed still increases but acceleration decreases
- Air resistance increase because speed increase
- Resultant force gets smaller
- Eventually the object falls in uniform velocity (reached terminal velocity)
- Weight balanced exactly by resistive force upwards
- Resultant force = 0 so there is no acceleration
- Air resistance is not increasing anymore because speed is not increasing
- Potential energy of the object is transferred to the internal energy of the fluid by drag forces
- Effect of parachute
- Increase air resistance due to larger area perpendicular to direction of travelling
- Resultant force upwards so deceleration
- Air resistance falls as speed falls
- Decelerates until air resistance get as big as speed so the object falls at uniform speed again
- Graph
- Gradient should start with gradient 9.81 \(ms^{-2}\) not bigger than 9.81 \(ms^{-2}\)
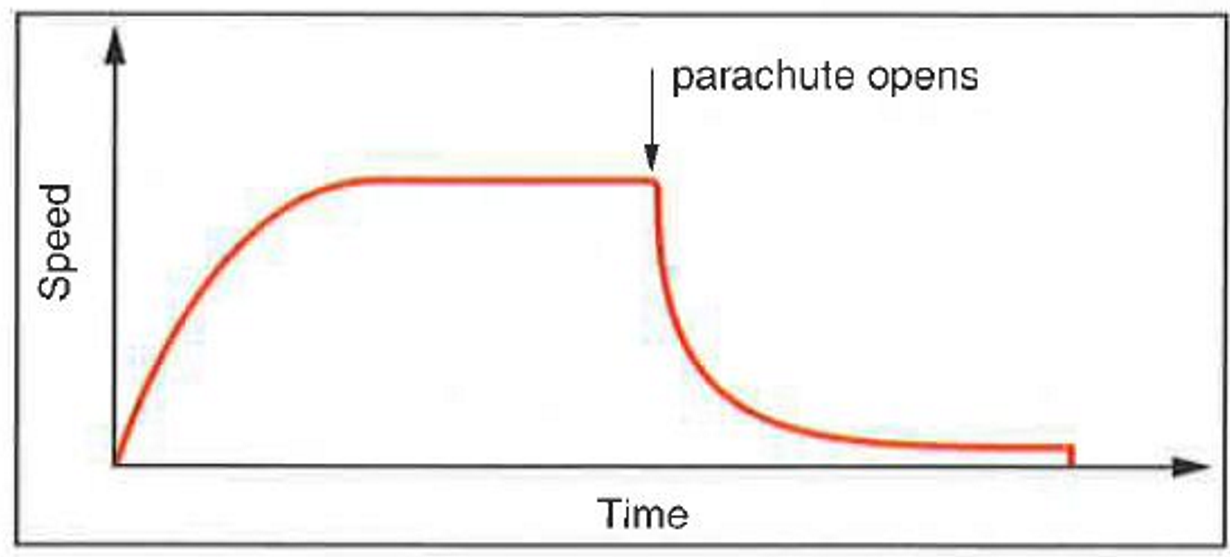
- (Same to other situations moving through a fluid - resistance increase until the maximum speed is reached)
Factors affecting terminal velocity
- Higher mass \(\rightarrow\) higher acceleration \(\rightarrow\) higher terminal velocity
- Higher volume / CSA \(\rightarrow\) more air resistance \(\rightarrow\) less acceleration \(\rightarrow\)' lower terminal velocity
3.4.1.5 Newton’s laws of motion
Newton's 1st law of motion
- If no resultant external force are acting on a body, it will
- If at rest, remain at rest
- If moving, keep moving at constant speed in a straight line
Newton's 2nd law of motion
- The acceleration of an object is proportional to the resultant force experienced by the object
- Acceleration is in the same direction as the resultant force
- \(\text{resultant force} = \text{mass} \times \text{acceleration}\)
- \(F = ma\)
Newton's 3rd law of motion
- When two objects interact, they exert equal and opposite forces on each other
3.4.1.6 Momentum
Momentum calculation
- \(\text{Momentum} = \text{mass} \times \text{velocity}\)
- \(p = mv\)
The principle of conservation of momentum
- Momentum is always conserved for a system of interacting objects provided that no external resultant force acts on the system
- Total final momentum = total initial momentum
Types of collisions
- Elastic
- There is no loss of kinetic energy during the collision
- Both momentum and KE are conserved
- \(m_{1} u_{1} + m_{2} u_{2} = m_{1} v_{1} + m_{2} v_{2}\)
- Inelastic: only momentum is conserved, some KE is lost
- Stick together: \(m_{1} u_{1} + m_{2} u_{2} = (m_{1} + m_{2}) v_{1 + 2}\)
- Colliding objects have less KE after the collision than before the collision
Explosion
- \(m_{1} v_{1} + m_{2} v_{2} = 0\)
- KE of the objects has increased
Newton's 2nd law of motion using momentum
- The rate of change of momentum of an object is equal to the resultant force on it
- \(F = \frac{\Delta (mv)}{\Delta t}\)
Impulse
- The change in momentum
- \(\text{Impulse} = F \Delta t = \Delta (mv)\)
Force-time graph
- Area = \(F \Delta t\) = change in momentum
Stopping distances
- \(\text{Thinking distance } s_{1} = \text{speed} \times \text{reaction time} = ut_{0}\)
- \(\text{Braking distance } s_{2} = \frac{u^{2}}{2a}\)
- \(\text{Stopping distance} = s_{1} + s_{2} = ut_{0} + \frac{u^{2}}{2a}\)
Contact and impact time
- \(\text{impact time} = \frac{2s}{u + v} = \frac{2 \times \text{distance moved by cars}}{\text{initial velocity} + \text{final velocity (of the same car)}}\)
- \(a = \frac{v - u}{t}\)
- \(F = ma = \frac{mv - mu}{t}\)
- (These calculations only need to be applied onto one car)
Why airbags / seatbelts / etc. work
- With no seat belt / airbag / etc. the person would not start to change their momentum until they hit the dashboard or windscreen
- The person comes to stop quickly (short impact time)
- Large change of momentum in a short time = large resultant force = large injury (\(F = \frac{\Delta (mv)}{t}\))
- With the seatbelt / airbag / etc. they will have a longer impact time (comes to stop more slowly)
- They will experience a smaller resultant force and so less injury
3.4.1.7 Work, energy and power
Work
- \(\text{Work done} = \text{force} \times \text{distance moved in the direction of the force}\)
- Unit = joules (J)
- \(W = Fs \cos \theta = \text{force} \times \text{displacement} \times \text{angle between force and direction of motion}\)
Force-displacement graphs
- Area under line = work done
Power
- Rate of doing work = rate of energy transfer
- \(P = \frac{\Delta E}{\Delta t} = \frac{\Delta W}{\Delta t} = Fv \cos \theta = \text{driving force} \times \text{velocity} \times \cos \theta\)
Efficiency
- \(\text{Efficiency} = \frac{\text{Useful work done}}{\text{Total energy input}} = \frac{\text{Useful energy output}}{\text{Total energy input}} = \frac{\text{Useful power output}}{\text{Total power input}}\)
- Can be expressed as a percentage
3.4.1.8 Conservation of energy
Principle of conservation of energy
- Energy cannot be created or destroyed but transferred from one store to another
Kinetic energy
- \(E_{k} = \frac{1}{2} mv^{2}\)
(Gravitational) potential energy
- \(E_{p} = mg \Delta h\)